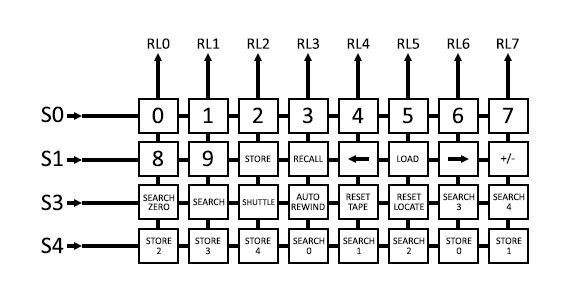
The A & B channels are identical. The A channel feeds digits to the Tape Time display, and the B channel feeds digits to the Locate Time display.
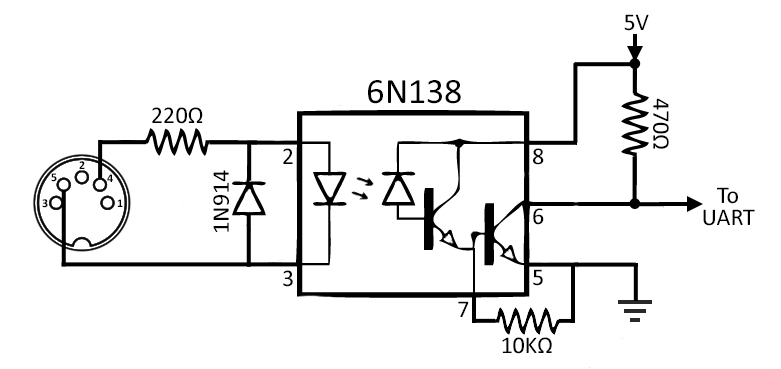
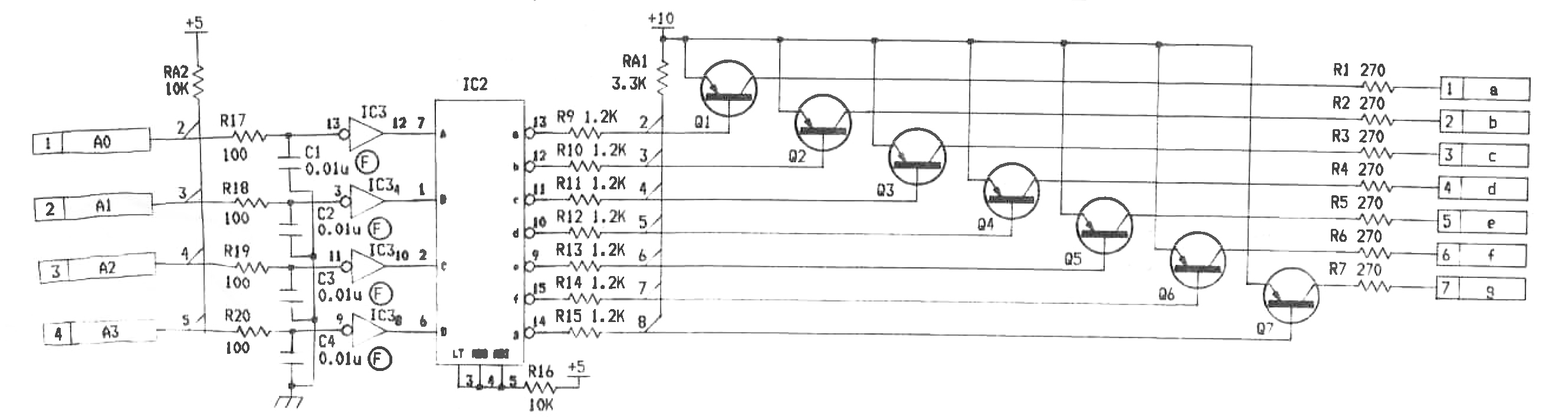
Unlike the three line S channel, these are four line channels, or four bits if you like, meaning they can generate 16 different combinations of ones and zeroes. The circuit has the same pull-up and spark protection as the S channel, as well as the same Hex Schmitt-Trigger Inverters. The four lines then enter IC2 on the A channel and IC6 on the B channel. These are SN74LS247N chips, which are BCD to Seven Segment Decoder/Driver chips. They take binary-coded decimal (BCD) inputs on four lines and drive a display. We are all familiar with a seven segment display, whether we know the name or not. It looks like this:
![]()
The seven segments start at the top, go around the display clock-wise, and end with the middle segment. They are given the designations a, b, c, d, e, f, and g. Let’s say you wanted to make the display show the number one. You would probably turn on the two segments on the right-hand side (b and c) and turn all of the other ones off, giving you this:
![]()
Based on our input, this particular chip provides the following outputs:
| A or B Input | Inverter Output | Decoder/Driver Output | |||||||
|---|---|---|---|---|---|---|---|---|---|
| A3 | A2 | A1 | A0 | A3 | A2 | A1 | A0 | Display | Value |
| 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | |
| 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | |
| 1 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 2 | |
| 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 3 | |
| 1 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 4 | |
| 1 | 0 | 1 | 0 | 0 | 1 | 0 | 1 | 5 | |
| 1 | 0 | 0 | 1 | 0 | 1 | 1 | 0 | 6 | |
| 1 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 7 | |
| 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 8 | |
| 0 | 1 | 1 | 0 | 1 | 0 | 0 | 1 | 9 | |
| 0 | 1 | 0 | 1 | 1 | 0 | 1 | 0 | — | |
| 0 | 1 | 0 | 0 | 1 | 0 | 1 | 1 | — | |
| 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | — | |
| 0 | 0 | 1 | 0 | 1 | 1 | 0 | 1 | — | |
| 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | — | |
| 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | — | |
Not much useful after the number 9, and I doubt the MTR-12 is using any of those.
Everything that happens in the circuit after this chip is actually irrelevant to us, so I am just going to ignore it all.
If I do what I did with the S channel, and remove all of the stuff in between the input and the useful information, I get this:
| A or B Input | Value | |||
|---|---|---|---|---|
| A3 | A2 | A1 | A0 | |
| 1 | 1 | 1 | 1 | 0 |
| 1 | 1 | 1 | 0 | 1 |
| 1 | 1 | 0 | 1 | 2 |
| 1 | 1 | 0 | 0 | 3 |
| 1 | 0 | 1 | 1 | 4 |
| 1 | 0 | 1 | 0 | 5 |
| 1 | 0 | 0 | 1 | 6 |
| 1 | 0 | 0 | 0 | 7 |
| 0 | 1 | 1 | 1 | 8 |
| 0 | 1 | 1 | 0 | 9 |
| 0 | 1 | 0 | 1 | — |
| 0 | 1 | 0 | 0 | — |
| 0 | 0 | 1 | 1 | — |
| 0 | 0 | 1 | 0 | — |
| 0 | 0 | 0 | 1 | — |
| 0 | 0 | 0 | 0 | — |
I did a little bit of analysis with my scope on the S Channel timing. The MTR-12 seems to be changing the state of the S Channel every 640 µsec or so. This means it is changing the state approximately 1575 times per second. That’s faster than I would have thought necessary, meaning every digit is getting updated almost 200 times per second. I guess that is useful when in fast rewind, or fast forward though, as the machine does move pretty fast in those modes. This also means that I have to keep my Arduino code lean enough so that it is long done any processing in a span of less than 640 µsec. I’m not sure if that will be challenging or not. I will have to do some measurements.
The first digit activated by the S Channel is the Sign Digit. On the MTR-12, this is just a minus sign that shows up if you rewind to a point earlier than the point you have marked as zero. I’m not entirely sure what the MTR-12 will be sending for this. It looks like it only has the middle segment (g) connected on that display, so maybe the machine will be sending it a regular digit that doesn’t have the g segment lit, like a 0, 1 or 7, for no sign, and any of the other ones for the – sign. I am going to make a guess that it is probably a 1 for no sign and a 2 for the – sign.
Time to do some experimentation, and some measurements for timing. Stay tuned…